IO 模型
2015-10-21
疑问:
- IO 模型,解决什么问题?
- 常见的 IO 模型,有哪些?
- IO 模型,实际应用
本文最重要的参考文献是Richard Stevens的UNIX® Network Programming Volume 1, Third Edition 6.2节 I/O Models,Stevens在这节中详细说明了各种IO的特点和区别,如果英文够好的话,推荐直接阅读。
简介
IO 模型,解决哪些问题?
- 单 Server 如何为多 Client 提供服务?
- 单 process 如何同时读写多个文件?
- 哪种方式,效率最高?
IO模型,要解决的根本问题:应用程序,如何高效率的,读写多个文件?
- 应用程序:用户进程
- 文件:Linux 内核将所有外部设备,都看做一个文件,fd,文件描述符
- 内核:用户进程对一个文件的读写,都通过内核来进行;内核会返回一个file descriptor(fd,文件描述符)
内核,屏蔽底层硬件的差异。
对一个socket的读写也会有相应的描述符,称为socketfd(socket描述符)。描述符就是一个数字,指向内核中一个结构体(文件路径,数据区,等一些属性)。那么我们的应用程序对文件的读写就通过对描述符的读写完成。
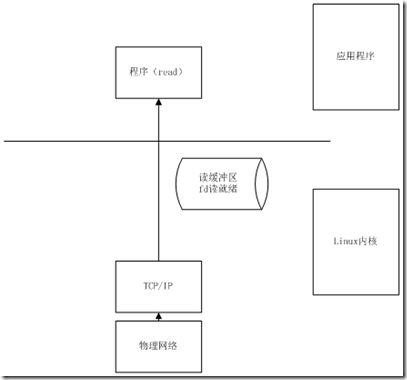
linux将内存分为内核区,用户区。linux内核给我们管理所有的硬件资源,应用程序通过调用系统调用和内核交互,达到使用硬件资源的目的。应用程序通过系统调用read发起一个读操作,这时候内核创建一个文件描述符,并通过驱动程序向硬件发送读指令,并将读的的数据放在这个描述符对应结构体的内核缓存区中,然后再把这个数据读到用户进程空间中,这样完成了一次读操作。
一个文件,需要通过内核缓冲区与用户进程交互,其中,内核缓冲区包含:读缓冲区、写缓冲区。
[补充]:IO 模型,还有一个类似的概念:服务器并发模型,其中会提到多进程并发、多线程并发等
IO 模型
Stevens在文章中一共比较了五种IO Model:
- blocking IO
- nonblocking IO
- IO multiplexing
- signal driven IO
- asynchronous IO
由于signal driven IO在实际中并不常用,所以我这只提及剩下的四种IO Model。
再说一下IO发生时涉及的对象和步骤。
对于一个network IO (这里我们以read举例),它会涉及到两个系统对象,一个是调用这个IO的process (or thread),另一个就是系统内核(kernel)。当一个read操作发生时,它会经历两个阶段:
- 等待数据准备 (Waiting for the data to be ready)
- 将数据从内核拷贝到进程中 (Copying the data from the kernel to the process)
记住这两点很重要,因为这些IO Model的区别就是在两个阶段上各有不同的情况。
blocking IO
在linux中,默认情况下所有的socket都是blocking,一个典型的读操作流程大概是这样:
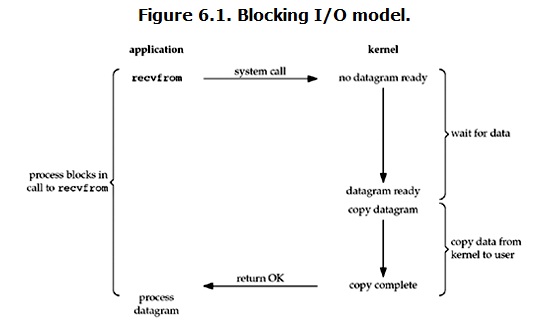
当用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据。对于network io来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的UDP包),这个时候kernel就要等待足够的数据到来。而在用户进程这边,整个进程会被阻塞。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除block的状态,重新运行起来。所以,blocking IO的特点就是在IO执行的两个阶段都被block了。
non-blocking IO
linux下,可以通过设置socket使其变为non-blocking。当对一个non-blocking socket执行读操作时,流程是这个样子:
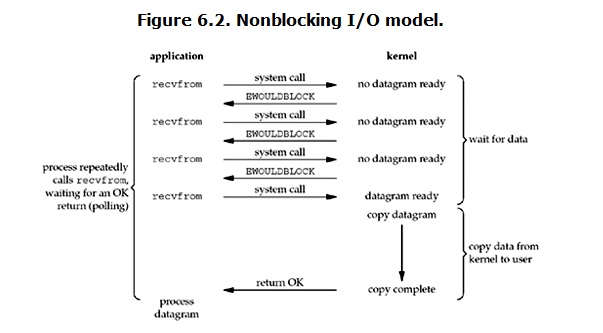
从图中可以看出,当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。
从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存,然后返回。 所以,用户进程其实是需要不断的主动询问kernel数据好了没有。
IO multiplexing
IO multiplexing这个词可能有点陌生,但是如果我说select,epoll,大概就都能明白了。有些地方也称这种IO方式为 Event driven IO (事件驱动 IO)。我们都知道,select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select/epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。它的流程如图:
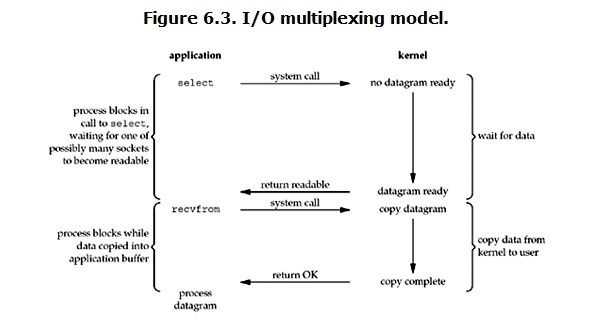
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
这个图和blocking IO的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和 recvfrom),而blocking IO只调用了一个system call (recvfrom)。但是,用select的优势在于它可以同时处理多个connection。(多说一句。所以,如果处理的连接数不是很高的话,使用select/epoll的web server不一定比使用multi-threading + blocking IO的web server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被block的。只不过process是被select这个函数block,而不是被socket IO给block。
Asynchronous I/O
linux下的asynchronous IO其实用得很少。先看一下它的流程:
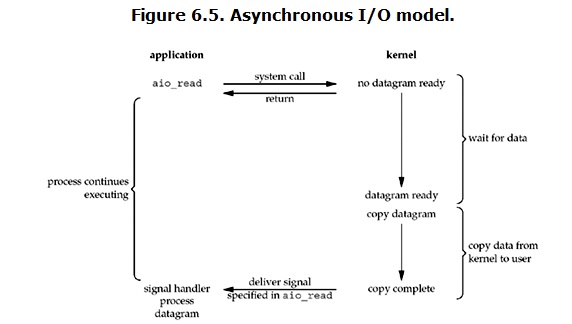
用户进程发起read操作之后,立刻就可以开始去做其它的事。而另一方面,从kernel的角度,当它受到一个asynchronous read之后,首先它会立刻返回,所以不会对用户进程产生任何block。然后,kernel会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都完成之后,kernel会给用户进程发送一个signal,告诉它read操作完成了。
小结
到目前为止,已经将四个IO Model都介绍完了。现在回过头来回答最初的那几个问题:
- blocking和non-blocking的区别在哪
- synchronous IO和asynchronous IO的区别在哪
先回答最简单的这个:blocking vs non-blocking。前面的介绍中其实已经很明确的说明了这两者的区别。调用blocking IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。即,关键是「数据准备」阶段,是否block。
在说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。Stevens给出的定义(其实是POSIX的定义)是这样子的:
- A synchronous I/O operation causes the requesting process to be blocked until that I/O operation completes;
- An asynchronous I/O operation does not cause the requesting process to be blocked;
两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,之前所述的blocking IO,non-blocking IO,IO multiplexing都属于synchronous IO。有人可能会说,non-blocking IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking IO在执行recvfrom这个system call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。而asynchronous IO则不一样,当进程发起IO 操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。即,关键是「数据从kernel buffer拷贝到process buffer」阶段,是否block。
各个IO Model的比较如图所示:
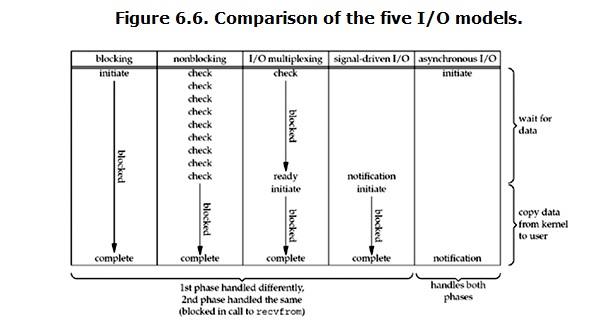
小结:
- blocking模型下,从应用进程调用IO操作函数到函数返回期间,进程处于阻塞状态;
- nonblocking模型下,应用程序调用IO操作函数时,函数会立即返回,但应用程序需要通过不断调用IO操作函数来轮询kernel,以便进行读/写操作;
- io多路复用模型下,应用程序调用select或poll时,进程阻塞直到select管理的fd可读/写,select或poll返回后,应用程序需要调用真正的IO操作函数进行读/写操作;
- asynchronous io模型下,应用程序调用异步IO函数时,函数立即返回,当函数完成真正的IO操作后,kernel会通知应用程序进行后续操作。它也避免了进程阻塞。
再举几个不是很恰当的例子来说明这四个IO Model:
有A,B,C,D四个人在钓鱼:
- A用的是最老式的鱼竿,所以呢,得一直守着,等到鱼上钩了再拉杆;
- B的鱼竿有个功能,能够显示是否有鱼上钩,所以呢,B就和旁边的MM聊天,隔会再看看有没有鱼上钩,有的话就迅速拉杆;
- C用的鱼竿和B差不多,但他想了一个好办法,就是同时放好几根鱼竿,然后守在旁边,一旦有显示说鱼上钩了,它就将对应的鱼竿拉起来;
- D是个有钱人,干脆雇了一个人帮他钓鱼,一旦那个人把鱼钓上来了,就给D发个短信。
补充说明
阻塞IO vs. 多路复用IO
IO多路复用模型与前面介绍的阻塞IO模型相比,似乎并没有优势,甚至还多一次系统调用。
事实上,若应用程序操作的fd只有1个时,通过select实现IO多路复用模式确实没有优势,但当进程操作的fd远不只1个时,select的优势就会体现出来,此时,这些fd通过select进行统一管理,这极大地简化了编程实现细节。
但目前kernel的select实现代码中,它能管理的fd上限默认只有1024个,且它在内部是通过依次遍历来确定某个fd是否可读/写的。因此,即使可以通过修改kernel相关代码来增加其管理的fd上限,但遍历fd数组仍然是个线性操作。因此,在fd数量较大时,通过select或poll实现的IO多路复用模型也会存在性能问题。
select vs. poll vs. epoll
详细介绍和比较参考:IO模型:阻塞/非阻塞/IO复用 同步/异步 Select/Epoll/AIO.
目前流行的Web Server(如Nginx)通常是通过内核提供的epoll或kqueue来管理fd的。
以epoll为例,其工作模式与本文介绍的I/O多路复用模型类似,只不过其管理的fd(s)满足读/写条件时,内核会通过回调通知epoll来获取这些fd,应用程序调用的epoll_wait会将这些可读/写的fd返回给应用程序;而采用select方式实现IO多路复用模式时,符合读/写条件的fd是通过select内部遍历整个fd数组来获取的,显然,epoll方式下的fd触发方式更高效。也正是由于回调触发避免了线性遍历,epoll可管理的fd数量可以很大且不影响触发性能。
由于epoll是通过事件驱动的(其事件触发方式分为Edge Triggered和Level Triggered两种,二者区别可通过man epoll查看),因此,借助epoll实现的IO操作模式又被称为 Event-Driven I/O模型。
在epoll模式下,由于epoll_wait通常是个阻塞调用,故epoll是个阻塞模型;至于同步还是异步,与epoll管理的fd被触发后的处理方式有关。 具体而言:
- 若其管理的fd可读/写条件触发后,进程主线程负责处理该fd对应的数据,则由于回调函数中真正进行数据读/写的IO操作仍然会阻塞(这里的阻塞是指从内核缓冲区拷贝数据至应用进程缓冲区的过程中,进程主线程会阻塞,阻塞时间取决于数据量),因此,从POSIX规范对同步/异步的定义来看,这种处理逻辑下的epoll模型是个同步模型。
- 若其管理的fd可读/写条件触发后,进程主线程将该fd压入队列,由其它线程负责从队列中消费该fd,则由于主线程不会阻塞,故这种处理逻辑下,此时的epoll模型是个异步模型。
多路复用IO
在IO编程过程中,当需要处理多个请求的时,可以使用多线程和IO复用的方式进行处理。上面的图介绍了整个IO复用的过程,它通过把多个IO的阻塞复用到一个select之类的阻塞上,从而使得系统在单线程的情况下同时支持处理多个请求。和多线程/进程比较,I/O多路复用的最大优势是系统开销小,系统不需要建立新的进程或者线程,也不必维护这些线程和进程。IO复用常见的应用场景:
- 客户程序需要同时处理交互式的输入和服务器之间的网络连接。
- 客户端需要对多个网络连接作出反应。
- 服务器需要同时处理多个处于监听状态和多个连接状态的套接字
- 服务器需要处理多种网络协议的套接字。
参考来源
- UNIX® Network Programming Volume 1, Third Edition
- IO - 同步,异步,阻塞,非阻塞
- Linux系统常见的网络编程I/O模型简述
- IO模型:阻塞/非阻塞/IO复用 同步/异步 Select/Epoll/AIO
- 高性能 IO 模型浅析
原文地址:https://ningg.top/io-model/